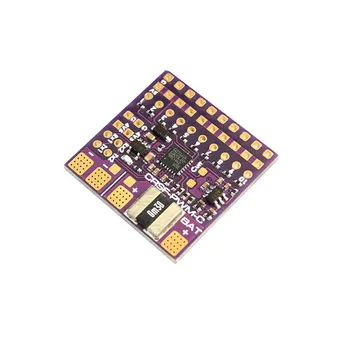











MATEK CRSF, ET PWM CONVERTER CRSF-PWM-6 CRSF-PWM-C jaoks TBS Crossfire Nano RX SE DIY Osad
CRSF-PWM Converter, CRSF-PWM-6 kooskõlas CRSF protokoll, vastuvõtja, ainult 6 PWM väljundit PWM sagedus seadistatav (50Hz vaikimisi 100,160,330, 400Hz) 2x UARTs (Vastuvõtja ja GPS) Telemeetria ID: RxBt, Curr, Capa, Pvt%, GPS, GSpd, Hdg, Alt, Sats 36V Max.aku pinge mõttes (1K:10K pingejaguri sisseehitatud), mis ühildub väliste Praegune andur (0~3.3 V) Vbat ja Praegune anduri skaala seadistatav Töökindel väärtus auto set uuendatav Püsivara nimipinge: 4~9V @5V pad, 0~36V @Vbat, 0~3.3 V @Curr Nr 5V regulaator sisseehitatud 25mm x 16mm, 1.3 g Pakend: 1x CRSF-PWM-6, Dupont 2.54 sõrmed CRSF-PWM Converter, CRSF-PWM-C kooskõlas CRSF protokoll, vastuvõtja, ainult 10x PWM väljundid PWM sagedus seadistatav (50Hz vaikimisi 100,160,330, 400Hz) 2x UARTs (Vastuvõtja ja GPS) Telemeetria ID: RxBt, Curr, Capa, Pvt%, GPS, GSpd, Hdg, Alt, Sats 36V Max.aku pinge mõttes (1K:10K pingejaguri sisseehitatud) Praegune sensor sisseehitatud (90A pidev /220A (Peak), praegune skaala = 150 vaikimisi Vbat ja Praegune anduri skaala seadistatav Töökindel väärtus auto set uuendatav Püsivara nimipinge: 4~9V @5V pad, 0~36V @BAT+ Nr 5V regulaator sisseehitatud 26mm x 26mm, 2.8 g Pakend: 1x CRSF-PWM-C, 1x madala ESR kondensaator, Dupont 2.54 sõrmed toite sealt ja Padjad Tx1/Rx1(UART1) eest CRSF protokoll, Vastuvõtja, Tx2 Rx2(UART2) GPS/firmware update/parameetrite määramine 1~10: CH1~CH10 PWM väljundid Curr: praegune anduri signaali (0~3.3 V) Vbat: Aku pinge sensing (0~36V) G: maa 4v5 pad pinge = 5V pad pinge -0.3 V, veenduge, et pinge 5V padi ei ole suurem kui vastuvõtja ja GPS pinge.Töökindel Töökindel väärtus on seadistatud automaatselt pärast CRSF-PWM juhatus on sisse lülitatud ja saada CRSF signaali.LED vilgub 8 korda kiiresti.Töökindel väärtus = Et PWM väärtus iga kanali(välja arvatud CH3) kui CRSF signaali kätte CRSF-PWM juhatuse esmakordselt CH3 on spetsiaalselt sisustatud seguklapp, Töökindel väärtus = 988 vaikimisi.Tavaliselt panin Throttle juhtnuppu, et madalaim punkt, pane AIL(Roll), ELE(Pigi), RUD(Pööramine) lähis enne toite sisse-vastuvõtja.LED-staatuse aeglaselt vilgub: CRSF-PWM juhatus ei saa CRSF signaali, näiteks, vastuvõtja on kohustatud koos saatja, vastuvõtja ei ole ühendatud UART1 kohta CRSF-PWM pardal. 8x kiire vilgub: CRSF-PWM juhatuse sai CRSF signaali ja töökindel väärtus on salvestatud.tahke aine KOHTA: CRSF-PWM juhatuse ja vastuvõtja töötavad tavaliselt 2x aeglaselt vilgub vahel 8x kiiresti vilkuma ja tahke aine kohta: CLI-režiim on aktiivne GPS-telemeetria kooskõlas GPS NMEA protokolli GPS "TX", et CRSF-PWM pardal "RX" Ühe traadi half duplex UART ühendus, CRSF-PWM pardal "TX" GPS "RX" ei ole oluline.Toetab GPS-Telemeetria ID: GPS, GSpd, Hdg, Alt, Sats u-blox seeria GPS-i võib väljastada "0+1 – UBX+NMEA" protokolli vaikimisi Andurid(GPS, GSpd, Hdg, Alt, Sats) vilgub aastal TELEMEETRIA Saatja kord tabeldusklahvi CRSF-PWM juhatus on seoses GPS-i.Tõrkeotsing, pole GPS-telemeetria, kontrollige juhtmestikku vahel, GPS ja CRSF-PWM juhatus, mõned u-blox GPS võib ära NMEA väljund protcol, sa pead olema läinud GPS vaikimisi konfiguratsiooni u-keskus.TIM & PWM Sagedusega PWM sageduse kõik 10x Kanaleid saab seadistada vastavalt TIM PWM joosta 50Hz vaikimisi TIM2: CH1, CH2, CH4 TIM16: CH3 TIM3: CH5, CH6, CH7, 8 AHELS TIM1: 9 AHELS, CH10 CLI režiimi, Kui CRSF-PWM juhatus ei tuvasta, GPS ühendatud UART2 10 sekundi jooksul pärast toite sisse, CLI režiim on aktiivne.Pärast CLI-režiim on aktiivne, CRSF-PWM pardal saab ühendatud konfiguraator USB-TTL moodul/FC-kanali kaudu.aastal CLI mode, CRSF-PWM juhatuse püsivara saab uuendada CLI režiim ei mõjuta vastuvõtja CRSF signaali ja PWM väljundid
| Päritolu | Mandri-Hiina |
| Kasutamine | Sõidukid & Puldiga Mänguasjad |
| Mudeli Number | CRSF, et PWM Converter |
| Soovitan Vanus | 12+y |
| Sõiduki Tüüp | Helikopterid |
| Materjal | Komposiitmaterjali |
| Brändi Nimi | FLY SKY |
0 Selle toote arvustused
Lisa läbivaatamine
Teie e-posti aadressi ei avaldata. Nõutud väljad on tähistatud *
Seotud tooted

HV 1S 3.8 V 450mAh 80C/160C 4.35 V Lipo Aku FPV Racing M80S Tiny7 Beta75S Emax Tinyhawk Snapper7 Undamine
Kirjeldada pinge: 1s 3.8 v hv maht: 450 mah heakskiidu reiting: 80c/160c orininal aku emax tinyhawk ii rassi ja exax tinyhawk freestyle ja tinyhawk tehtud seeria. komplekti kuulub: 1/3/5/10pcs 1 s 450mah 4.35 v patarei ( ph2.0 valge pistik)

Ülevaade: fs-i6s saatja ja fs-ia6b vastuvõtja endast 10 channel 2.4 ghz afhds 2a digitaalse proportsionaalne elektrooniline rc süsteemi.see süsteem toetab quadcopters. kui afhds 2a (automaatne sagedushüplemise digitaalse süsteemi teine põlvkond) välja töötatud ja patenteeritud flysky on spetsiaalselt välja töötatud kõik raadio kontrolli mudelid.pakub suurepärast

Meteor75 BT2.0 1S BWhoop Racing Quadcopter F4 1-2S AIO Harjadeta FC 1102 18000KV mootor M01 AIO Kaamera VTX Mini Undamine Õhusõiduki
Meteor75 bt2.0 1s bwhoop racing quadcopter f4 1-2s aio harjadeta fc 1102 18000kv mootor m01 aio kaamera vtx mini undamine õhusõiduki elrs 2.4 g versioon expresslrs on kõige populaarsem raadio link 2021. aastal. expresslrs eesmärk on saavutada parim võimalik seos tulemuslikkuse nii kiirust, latentsus, ja valik.rohkem teada expresslrs projekti github või liituda arutelu facebook grupis . selleks,

RG106 Undamine GPS-8k Dual Camera Professionaalne Nelja Telje Õhusõiduki Harjadeta Kokkupandav Õhust Fotograafia RC Lennukite Mänguasi
Mudel: rg106 & rg106pro harjadeta mootor: 1506 mootori võimsus: 1700/kv ptz: kolm-telg mehaaniline pea saanud sagedus: 5g kaamera: reguleeritav kaamera 90°.self-stabiliseeriv elektrooniline pildistabilisaator objektiiv rc-stand suurus (toetab suurim mobiiltelefonide suurus): 5,5 cm kaugjuhtimispuldi aku: sisseehitatud liitium aku undamine aku: 7.4 v 3800mah lennu

Suure jõudlusega programmeeritav digitaalne standard servo, võimalik ühise kasutamise robotid, mehaanilised käed, ronida autode ja puldiga mänguasjad.peamised funktsioonid on kiire soojuse hajumise,suur pöördemoment kõrge ühilduvuse ,tundlik ja paindlik jne.hea valik ülikooli professorid ja üliõpilased, kes on huvitatud arendada tarkvara robot osad. - kõrge-täppis metallist hammasrattad

Syma x21 x21w quadcopter puldiga helikopter tarvikud, varuosad uav mootori osad pakendis:4tk mootorid kaal 5g, läbimõõt: 8mm, pikkus 16mm

1:16 Rear Hub Carrier Kruvid 86012 jaoks 94186 HSP Racing 1/16 Skaala RC Auto Varuosad, UUS ENRON
100% brand new osa nr:86012 osa nimetus: rear hub carrier palun vaadake oma õpetuse osa number ja pilt kogus:nagu pildil

Metallist väljalasketoru ühine jaoks 1/5 fg rofun rovan bm auto rc auto osad

Väike ja kerge disain. täielik kokkupandud ettevalmistav lennu ülikond. õhusõiduki kasutab ultra-raske epp erilist vaht materjali, mis on paindlik ja vastupidav langeda. isegi kui sa ei ole kunagi lennanud mudel enne, saab sõita lihtsalt. võimas mootor võimaldab mudel stardi kergesti maapinnast. 2.4 ghz 4ch õhusõidukite, sealhulgas 4 suunamata sõidab, kasvav, kahanev, keerates

Eest FMS FCX24 Messing Esi-Ja Tagumise Portaali Eluasemele Seatud 1/24 RC Crawler Auto Uuendamine Osad Tarvikud
Eest fms fcx24 messing esi-ja tagumise portaali eluasemele seatud 1/24 rc crawler auto uuendamine osad tarvikud toetust dropshipping ja hulgimüük. 100% täiesti uus valmistatud messingist, mis on tugevam ja vastupidavam, parandada välimust lihtne kasutada,lihtne asendada madalam raskuskese, parandada ronida tulemuslikkuse eesmine sisemine portaali eluaseme kaal: 9,5 g/tk tagumine

Metallist Tagumine Põrkeraud, koos LED-Tuli 1/10 TRAXXAS TRX4 G500 RC Auto Osad, Tarvikud
Vastupidav metallist tagumine põrkeraud, koos led-tuli trx4 g500 4x4 rc auto upgrade osad kirjeldus: uudne välimus ja peen töö kaasas led tuled ja takud konks lihtne paigaldada originaal auto augud paigaldamine, ei ole vaja punch seal on üks m3 traat auk ja ühe m2, traadi auk eesotsas vedada konks.palun vasta asjakohane fikseeritud konksu kuuli või otse tõmba läbi kruvi. kui

Axspeed esi - /tagumine tala sulg (kyx mudelid) alumiiniumist kandetala hoidikut 1/10 axial scx10 ii 90046 rc rock crawler auto osad omadused: valmistatud alumiinium sulamist! hea kvaliteedi ja 100% brand, parim valik hobbyist! lihtne kasutada, kompaktne ja kaasaskantav, muutes oma kogemusi rohkem imeline. tehnilised andmed: materjal: alumiinium värv: must suurus:nagu
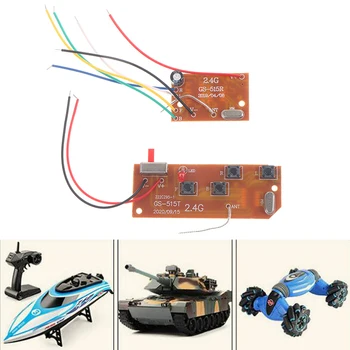
2.4 g 4ch rc pult 27mhz pcb circuit saatja ja vastuvõtja juhatuse antenni ja raadiosüsteemi auto veoauto mänguasi kirjeldus: 100% täiesti uus ja kvaliteetne elektroonilise sagedus: 27mhz pinge: 4.5 v-6v positiivse ja negatiivse poolusega: 3v materjal: metall vastuvõtja suurus:avaldaja. 3.8x2.5cm saatja suurus:avaldaja. 3.1x7.2cm kogus: 1 komplekt märkus: üleminek:


Axspeed 4tk 43mm alumiinium keermestatud tele amortisaator siiber jaoks 1/24 axial scx24 90081 axi00001 002 004 005 006 rc crawler omadused: 100% täiesti uus ja kvaliteetne. uuendada oma rc auto, ja abi, et parandada selle tulemuslikkust. suurendada üldist jõudlust ja vastupidavust oma rc auto. tehnilised andmed: materjal: alumiinium kogus: 4tk/set kaal: 15g suurus:
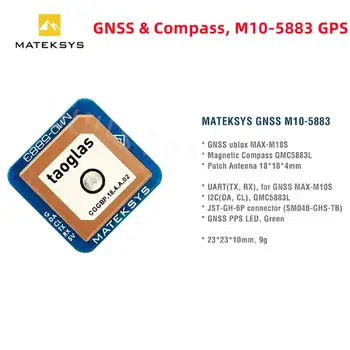
23x23mm mateksys matek m10-5883 gnss kompass gps moodul uart jaoks rc multirotor lennuk fikseeritud tiibadega fpv drones diy osad m10-5883 kasutab multi-constellation gnss powered by u-b-lox max-m10s.max-m10s toetab samaaegset vastuvõtu neli gnss (gps, glonass, galileo, ja beidou).suure arvu nähtavate satelliitide võimaldab vastuvõtja valida parima signaali.see maksimeerib positsiooni kättesaadavus,

Metallist esi-tagatelje steering knuckles eluaseme portaali kaas axial scx10 iii axi03007 ar45 telje capra f9 portaali telje funktsioonid: esi - / tagatelg steering knuckles korpus, sobib 1/10 rc crawler axial scx10 iii ar45 telje ja capra f9 telje.kõrge kvaliteediga cnc freesitud.asenda originaal plast osad, suurendada tasakaalu ja vastupidavust. 3 värvid.vastupidav ja lihtne paigaldada.kirjeldus:

Frsky Smart Port GPS-ADV EELNEVALT Andur V2 X8R X6R X4R Ühilduv (SP GPS-V2) GPS-S. Sadam
Frsky ette (adv) seeria on kõikehõlmav tüüpi andur ja täiustatud tulemuslikkuse ja võime originaal andur rea, kõik adv andurid täielikult toetada fbus protokolli ja nad on ka s. port kooskõlas.koos fbus protokolli adv andurid saab sujuvalt ühendatud fbus võimeline vastuvõtja ja veelgi lihtsustada ehitab setup. kui ms seeria gps andur, mis annab täpse kellaaja sünkroonimine koos gps-satelliitide

See on terasest nr 45, mitte roostevabast terasest, see on mingi rauast, kuid see on raskem kui tavaline raud.suurus kirjeldus: järgmised 6 liiki sidurid on 14 mm läbimõõduga ja 22mm pikk. 4-4, ühel küljel ava 4mm, teine ots on ava 4mm; (pool auk m4 masin kruvi) 4-5,üks pool ava 4mm,teine ots on ava 5mm;(pool auk m4 masin kruvi) 4-6,ühel küljel ava 4mm,teine ots on ava 6mm;(pool

Deklaratsioon: see on elektrooniline kiiruse regulaator (esc) auto.suure võimsusega süsteem rc mudel on väga ohtlik, nii et palun lugege seda kasutusjuhend hoolikalt läbi.kuna me ei saa kontrollida, õige kasutamise, paigaldamise, rakenduse või hooldus meie tooted, meil pole mingit vastutust, tuleb eeldada, ega nõustuda mis tahes kahjude eest, kahjud või kulud, mis tekivad ravimi kasutamisel. mis

Omadused: puldiga jäigatiivaline,kaugjuhtimispult sõiduki (1 / 8 võidusõidu sõiduki) iga rakendused lennuk, helikopter sport & konkurentsi sobib kõige o. s. mootorid kirjeldus: värv:nagu pildil materjal: metall pakett sisaldab:1tk/10tk toodete loetelu: 1tk/10tk * hõõgküünal märkus: palun mõista, sest valguse kiirguse eest või arvuti ekraani